Ένα ρομπότ είναι ένας μηχανικός ή εικονικός τεχνητός παράγοντας, γενικά μια ηλεκτρομηχανική μηχανή που καθοδηγείται από ένα πρόγραμμα υπολογιστή που χρησιμοποιεί ηλεκτρονικά κυκλώματα . Τα ρομπότ μπορούν να είναι αυτόνομα ή ημιαυτόνομα και να κυμαίνονται από ανθρωποειδή, όπως το Honda's είναι το προηγμένο βήμα στην καινοτόμο κινητικότητα και τα TOSY's. TOSY Ping Pong Παίζοντας ρομπότ σε βιομηχανικά ρομπότ, ρομπότ υποβοήθησης διπλωμάτων ευρεσιτεχνίας, ιατρικά λειτουργικά ρομπότ, ρομπότ θεραπείας σκύλου, συλλογικά προγραμματισμένα σμήνη ρομπότ, ακόμη και μικροσκοπικά νανορομπότ. Αναπαριστώντας μια ζωή σαν εμφάνιση ή αυτοματοποίηση κινήσεων, ένα ρομπότ μπορεί να μεταφέρει μια αίσθηση νοημοσύνης ή μόνη της. Αυτό το άρθρο ασχολείται με ασύρματα ρομποτικά οχήματα που βασίζονται σε αισθητήρες υπερύθρων.
Τι είναι ένα ασύρματο ρομποτικό όχημα;
ο το ρομπότ είναι μια τεχνολογία που ασχολείται με το σχεδιασμό, την κατασκευή, τη λειτουργία και την εφαρμογή ρομπότ, καθώς και συστημάτων υπολογιστών, χρησιμοποιείται για τον έλεγχο, η αισθητηριακή ανατροφοδότηση και η επεξεργασία πληροφοριών ονομάζονται ρομπότ. Αυτή η τεχνολογία ασχολείται με αυτοματοποιημένες μηχανές που μπορούν να τοποθετηθούν από ανθρώπους σε επικίνδυνα περιβάλλοντα ή να μοιάζουν με ανθρώπους σε εμφάνιση, συμπεριφορά. Σήμερα τα ρομπότ εμπνέονται από τη φύση συμβάλλοντας στον τομέα της ρομποτικής που εμπνέεται από τη βιολογία. Αυτά τα ρομπότ δημιούργησαν επίσης έναν νέο κλάδο ρομποτικής και μαλακής ρομποτικής. Οι μηχανικές τεχνικές που αναπτύχθηκαν κατά τη βιομηχανική εποχή, υπάρχουν πιο πρακτικές εφαρμογές όπως αυτοματοποιημένα μηχανήματα, τηλεχειριστήριο και ασύρματο τηλεχειριστήριο.

Ασύρματο ρομποτικό όχημα
Τι είναι ένας αισθητήρας υπερύθρων;
Ενα Αισθητήρας υπερύθρων είναι μια συσκευή που εκπέμπει για να ανιχνεύσει ορισμένες πτυχές του περιβάλλοντος που ανιχνεύει την υπεριώδη ακτινοβολία που πέφτει πάνω της. Ο πομπός είναι απλά ένα LED IR ( Δίοδος εκπομπής φωτός ) και ο ανιχνευτής είναι απλά μια φωτοδίοδος IR που είναι ευαίσθητη στο φως IR του ίδιου μήκους κύματος εκπέμπεται από το IR LED. Όταν το φως IR πέφτει στη φωτοδίοδο, οι αντιστάσεις και οι τάσεις εξόδου, αλλάζουν ανάλογα με το μέγεθος του φωτός IR που λαμβάνεται. Υπάρχουν πολλοί τύποι αισθητήρων υπερύθρων που είναι κατασκευασμένοι και μπορούν να κατασκευαστούν ανάλογα με την εφαρμογή. Αισθητήρες αντίθεσης (Χρησιμοποιούνται σε Γραμμή ακολουθώντας ρομπότ ), Οι αισθητήρες εγγύτητας (χρησιμοποιούνται σε τηλέφωνα με οθόνη αφής) και οι αισθητήρες απόφραξης (χρησιμοποιούνται για την καταμέτρηση αγαθών και σε συναγερμούς διαρρήκτη) είναι μερικά παραδείγματα.

Αισθητήρας υπερύθρων
Ασύρματο ρομπότ τηλεχειριστηρίου ραδιοσυχνοτήτων
Το ασύρματο ρομποτικό όχημα ελεγχόμενο με RF περιλαμβάνει κυρίως πομπό RF και δέκτη RF.
Πομπός RF
Ενότητες RF είναι συνήθως πολύ μικρό μέγεθος και λειτουργούν στο εύρος τάσης από 3V έως 12V. Οι μονάδες πομπού RF έχουν σχεδιαστεί ώστε να λειτουργούν μόνο με συχνότητα 433MHz. Εάν εκπέμπεται λογική μηδέν, τότε δεν τραβάται ισχύ από τον πομπό. Για μετάδοση, η λογική είναι μία, καταναλώνει ισχύ περίπου 4,5 mA με 3V. Ο πομπός και ο δέκτης διασυνδέθηκαν με το 8051 μικροελεγκτές και πάρτε την επιθυμητή λειτουργία. Ο πομπός RF έχει τροφοδοτήσει τάση από 3V έως 6V και ισχύ εξόδου από 4V έως 12V.

Πομπός RF
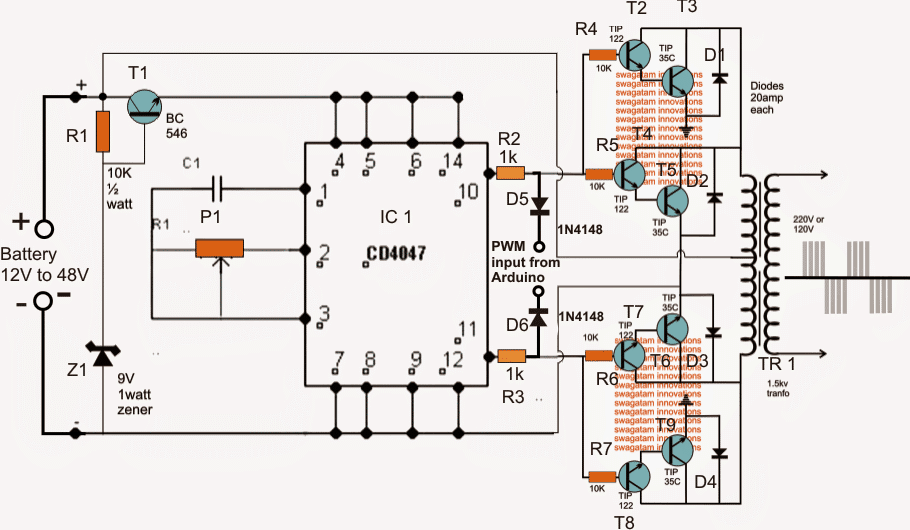
Το διάγραμμα κυκλώματος πομπού RF που φαίνεται παρακάτω χρησιμοποιείται για τη σύνδεση διαφορετικών πλήκτρων για την κίνηση του ρομποτικού οχήματος σε διαφορετικές κατευθύνσεις όπως προς τα εμπρός, προς τα πίσω, δεξιά και αριστερά. Έτσι, πατώντας το κατάλληλο κουμπί, μπορούμε να ελέγξουμε την κίνηση του ρομποτικού οχήματος.
Δέκτης RF
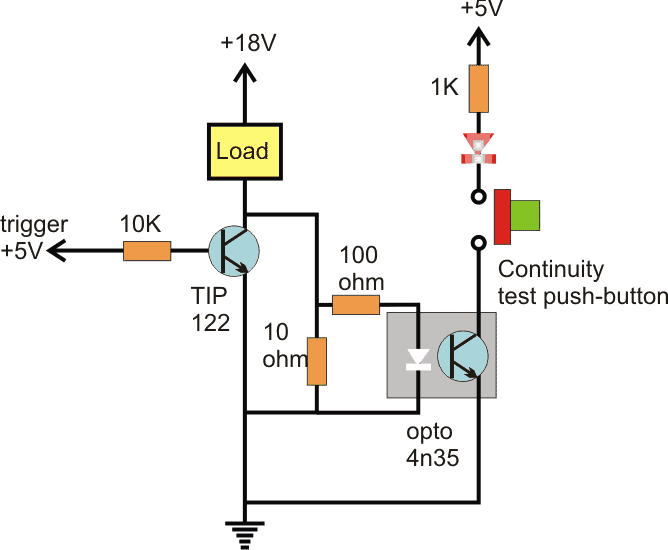
Ο δέκτης RF είναι επίσης μικρός σε μέγεθος και ο δέκτης RF έχει ρεύμα τροφοδοσίας 3,5mA με τάση λειτουργίας 5V. Οι μονάδες πομπού RF έχουν σχεδιαστεί για να λειτουργούν μόνο με 433MHz (που πρέπει να ταιριάζουν με τη συχνότητα του πομπού για σκοπούς επικοινωνίας για τη λήψη σημάτων από τον πομπό).

Δέκτης RF
Επικοινωνία RF χρησιμοποιώντας το Robotic Vehicle
Η ραδιοσυχνότητα (RF) αποτελείται από έναν πομπό και έναν δέκτη, ο οποίος συνδέεται με ένα απομονωμένο κύκλωμα που πρόκειται να ελεγχθεί. Ένα σήμα ελέγχου μεταφέρεται από το άκρο του πομπού με τη μορφή ραδιοκυμάτων ή ηλεκτρομαγνητικών κυμάτων, έτσι ώστε να ελέγχεται η συσκευή από απόσταση, η οποία είναι συνδεδεμένη στο άκρο του δέκτη. Αυτό το σήμα ελέγχου μεταδίδεται χρησιμοποιώντας ηλεκτρομαγνητικά κύματα ή ραδιοκύματα ραδιοσυχνοτήτων. Έτσι, το σήμα ελέγχου που λαμβάνεται στο άκρο του δέκτη και λαμβάνει την ακριβή έξοδο όπως ρομποτικό όχημα, ρομπότ ειδικής χρήσης, συσκευή σκοπού επικοινωνίας και ούτω καθεξής.
Ρομποτικό όχημα ελεγχόμενο με RF
Ο κύριος στόχος αυτού του έργου είναι να σχεδιάσει ένα ρομποτικό όχημα που ελέγχεται από τηλεχειριστήριο τηλεόρασης. Εδώ, το προτεινόμενο σύστημα χρησιμοποιεί Τεχνολογία RF για απομακρυσμένη λειτουργία. Ένας αισθητήρας υπερύθρων συνδέεται με τη μονάδα ελέγχου του ρομπότ για την ανίχνευση των υπέρυθρων σημάτων που μεταδίδονται από το τηλεχειριστήριο. Για την προτιμώμενη λειτουργία χρησιμοποιείται μια σειρά 8051 του μικροελεγκτή.
Στην ενότητα μετάδοσης (TX), χρησιμοποιούνται κουμπιά για την αποστολή των εντολών στο άκρο του δέκτη για τον έλεγχο της κίνησης του ρομπότ, είτε για κίνηση σε τέσσερις κατευθύνσεις όπως προς τα εμπρός, δεξιά, πίσω και αριστερά, κλπ. Στο τμήμα λήψης, δύο κινητήρες διασυνδέθηκαν με τον οικογενειακό μικροελεγκτή 8051 όπου χρησιμοποιούνται για την κίνηση του οχήματος.

Κιτ έργου ασύρματου ρομποτικού οχήματος με βάση τον αισθητήρα IR
Το τηλεχειριστήριο δημιουργεί δεδομένα βασισμένα σε RC5 που λαμβάνονται από έναν δέκτη υπερύθρων που συνδέεται με τον μικροελεγκτή. Το ενσωματωμένο πρόγραμμα στον μικροελεγκτή αναφέρεται στον κώδικα για την παραγωγή προτιμώμενης εξόδου βάσει των δεδομένων i / p για τη λειτουργία των κινητήρων μέσω ενός IC οδηγού κινητήρα.
Ο πομπός RF λειτουργεί ως τηλεχειριστήριο RF που έχει το πλεονέκτημα του άφθονου εύρους (έως 200 μέτρα) με την κατάλληλη κεραία, ενώ ο δέκτης αποκωδικοποιεί πριν από την τροφοδοσία σε άλλο μικροελεγκτή σε οδηγήστε κινητήρες DC μέσω IC οδηγού κινητήρα για την απαιτούμενη εργασία.
Επιπλέον, αυτό το έργο μπορεί να βελτιωθεί χρησιμοποιώντας Τεχνολογία DTMF . Χρησιμοποιώντας την τεχνολογία RF μπορούμε να ελέγξουμε το ρομπότ χρησιμοποιώντας ένα κινητό τηλέφωνο. Αυτή η τεχνολογία έχει ένα πλεονέκτημα έναντι της μεγάλης εμβέλειας επικοινωνίας σε σύγκριση με την τεχνολογία RF.
Έτσι, αυτό αφορά τα ασύρματα ρομποτικά οχήματα που βασίζονται σε αισθητήρες υπερύθρων. Ελπίζουμε να έχετε καλύτερη κατανόηση αυτής της έννοιας. Επιπλέον, τυχόν αμφιβολίες σχετικά με αυτήν την έννοια ή ηλεκτρικά και ηλεκτρονικά έργα , δώστε τα σχόλιά σας στην παρακάτω ενότητα σχολίων. Εδώ είναι μια ερώτηση για εσάς, ποια είναι η κύρια λειτουργία του αισθητήρα IR;