Μια ηλεκτρική μηχανή που μετατρέπει ηλεκτρική ενέργεια σε μηχανική ενέργεια ονομάζεται ηλεκτρικός κινητήρας. Ο πρώτος και κύριος ηλεκτρικός κινητήρας είναι μια απλή ηλεκτροστατική συσκευή που δημιουργήθηκε από τον σκωτσέζο μοναχό Andrew Gordon το 1740. Όμως το 1821, ο Μάικλ Φαραντάι επέδειξε τη μετατροπή της ηλεκτρικής ενέργειας σε μηχανική ενέργεια.
Οι ηλεκτρικοί κινητήρες ταξινομούνται κυρίως σε δύο κατηγορίες: κινητήρες AC και Κινητήρες DC . Και πάλι, κάθε κατηγορία υποδιαιρείται σε πολλούς τύπους. Πολλά φορτία όπως μίξερ, μύλος, ανεμιστήρες κ.λπ., χρησιμοποιούνται συχνότερα οικιακές συσκευές στις οποίες μπορούμε να βρούμε διαφορετικούς τύπους κινητήρων και αυτά μπορούν να λειτουργούν σε διαφορετικές ταχύτητες με την παροχή ταχύτητας ελέγχου των κινητήρων. Σε αυτό το άρθρο, θα συζητήσουμε για έναν από τους σημαντικότερους τύπους κινητήρων DC, δηλαδή Βηματικός κινητήρας και ο έλεγχός του χρησιμοποιώντας τον μικροελεγκτή.
Κινητήρας Stepper
Ένα σύγχρονο και κινητήρας DC χωρίς ψήκτρες που μετατρέπει τους ηλεκτρικούς παλμούς σε μηχανικές κινήσεις και έτσι περιστρέφεται σταδιακά με μια συγκεκριμένη γωνία μεταξύ κάθε βήματος για την ολοκλήρωση μιας πλήρους περιστροφής ονομάζεται Stepper Motor. Η γωνία μεταξύ των βημάτων περιστροφής του κινητήρα stepper ορίζεται ως η γωνία stepper του κινητήρα.

Κινητήρας Stepper
Οι κινητήρες Stepper ταξινομούνται σε δύο τύπους ανάλογα με την περιέλιξή τους: Unipolar Stepper Motors και Bipolar Stepper Motors. Ο μονοπολικός βηματικός κινητήρας χρησιμοποιείται συχνά σε πολλές εφαρμογές λόγω της ευκολίας λειτουργίας του σε σύγκριση με τον διπολικό βηματικό κινητήρα. Ωστόσο, υπάρχουν διάφοροι τύποι κινητήρων stepper όπως ο μόνιμος κινητήρας Stepper Motor, ο κινητήρας Stepper Motor Variable Reluctance και το Hybrid Stepper Motor.
Έλεγχος κινητήρα Stepper
Ο κινητήρας stepper μπορεί να ελεγχθεί με διάφορες τεχνικές, αλλά εδώ συζητάμε τον έλεγχο κινητήρα stepper χρησιμοποιώντας ένα Μικροελεγκτής Atmega . Το 89C51 είναι ένας μικροελεγκτής του 8051 οικογένεια μικροελεγκτών .

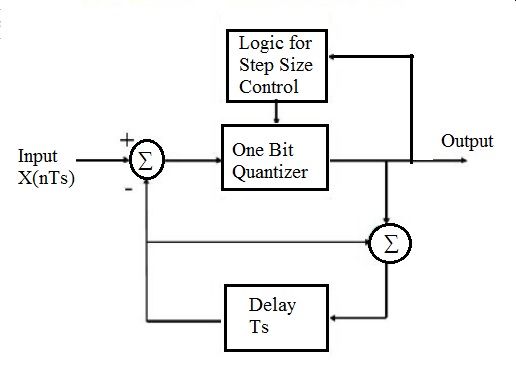
Διάγραμμα μπλοκ του Stepper Motor Control
Το διάγραμμα μπλοκ ενός ρυθμιστή κινητήρα stepper που χρησιμοποιεί έναν μικροελεγκτή 8051 φαίνεται στο σχήμα με παροχή ηλεκτρικού ρεύματος , μπλοκ μικροελεγκτή, stepper motor και διακόπτη ελέγχου.
2 Μέθοδοι σχεδίασης κυκλώματος ελέγχου κινητήρα Stepper
Έχει σχεδιαστεί ο ρυθμιστής κινητήρα stepper χρησιμοποιώντας 8051 μικροελεγκτές και κύκλωμα μεταγωγής για τον έλεγχο της ταχύτητας του κινητήρα stepper. Το κύκλωμα διακόπτη ελέγχου μπορεί να σχεδιαστεί χρησιμοποιώντας διακόπτες τρανζίστορ ή με τη χρήση IC ρυθμιστή κινητήρα stepper, όπως ULN2003 στη θέση των τρανζίστορ.
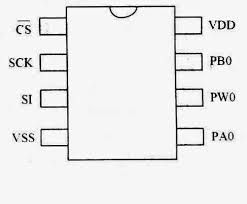
1. Κύκλωμα ελέγχου χρησιμοποιώντας IC Stepper Motor Controller
Ο μονοπολικός βηματικός κινητήρας μπορεί να περιστραφεί ενεργοποιώντας τα πηνία στάτορα σε μια σειρά. Η ακολουθία αυτών των σημάτων τάσης που εφαρμόζονται στα πηνία κινητήρα ή τους αγωγούς είναι αρκετή για την κίνηση του κινητήρα και ως εκ τούτου, δεν απαιτείται κύκλωμα οδήγησης για τον έλεγχο της κατεύθυνσης του ρεύματος στα πηνία στάτορα.

Stepper Motor Control με χρήση IC
Ο κινητήρας δύο φάσεων αποτελείται από τέσσερα άκρα που συνδέονται με τα πηνία και δύο κοινά καλώδια που συνδέονται με τα δύο ακροδέκτες οδηγούν σε δύο φάσεις. Τα κοινά σημεία και τα τελικά σημεία των δύο φάσεων συνδέονται με τη γείωση ή Vcc και τις ακίδες μικροελεγκτή, αντίστοιχα. Για περιστροφή του κινητήρα, πρέπει να ενεργοποιούνται τα τελικά σημεία των δύο φάσεων. Κυρίως εφαρμόζεται μια τάση στο πρώτο τελικό σημείο της φάσης 1, και περαιτέρω τάση εφαρμόζεται στο πρώτο τελικό σημείο της φάσης 2, και ούτω καθεξής.
Ο κινητήρας stepper μπορεί να λειτουργήσει σε διαφορετικούς τρόπους όπως Wave Stepping Mode, Full Drive Stepping Mode και Half Drive Stepping Mode.
Λειτουργία Stepping Wave Drive
Επαναλαμβάνοντας την παραπάνω ακολουθία, ο κινητήρας μπορεί να περιστραφεί σε λειτουργία βηματοδότησης κυμάτων είτε προς τα δεξιά είτε αριστερόστροφα με βάση την επιλογή των τελικών σημείων. Ο παρακάτω πίνακας δείχνει την ακολουθία φάσης σήματος για λειτουργία κλιμάκωσης-κίνησης.


Λειτουργία Stepping Wave Drive
Λειτουργία Stepping Full Drive
Η ταυτόχρονη ενεργοποίηση των δύο τελικών σημείων διαφορετικών φάσεων επιτυγχάνει τη λειτουργία πλήρους κίνησης. Ο πίνακας δείχνει την ακολουθία φάσης σήματος για τη λειτουργία πλήρους κίνησης.


Λειτουργία Stepping Full Drive
Λειτουργία βήματος μισού δίσκου
Ο συνδυασμός των βημάτων των τρόπων κύματος και πλήρους κίνησης επιτυγχάνει λειτουργία μισής κίνησης. Έτσι, σε αυτόν τον τρόπο, η γωνία κλιμάκωσης χωρίζεται σε μισό. Ο πίνακας δείχνει την ακολουθία φάσης σήματος ενός τρόπου μισής κίνησης.


Λειτουργία βήματος μισού δίσκου
Γενικά, η γωνία βηματισμού εξαρτάται από την ανάλυση του βηματικού κινητήρα. Το μέγεθος των βημάτων και η κατεύθυνση περιστροφής είναι άμεσα ανάλογες με τον αριθμό και τη σειρά της ακολουθίας εισόδου. Η ταχύτητα περιστροφής του άξονα εξαρτάται από τη συχνότητα της ακολουθίας εισόδου. Η ροπή και ο αριθμός μαγνητών μαγνητισμένων κάθε φορά είναι ανάλογοι.
Ο κινητήρας stepper απαιτεί ρεύμα 60mA, αλλά η μέγιστη βαθμολογία ρεύματος του μικροελεγκτή Atmega AT89C51 είναι 50mA. Έτσι, ένας ελεγκτής stepper-motor-IC χρησιμοποιείται για διασύνδεση του κινητήρα stepper με τον μικροελεγκτή για τη μεταφορά των σημάτων.
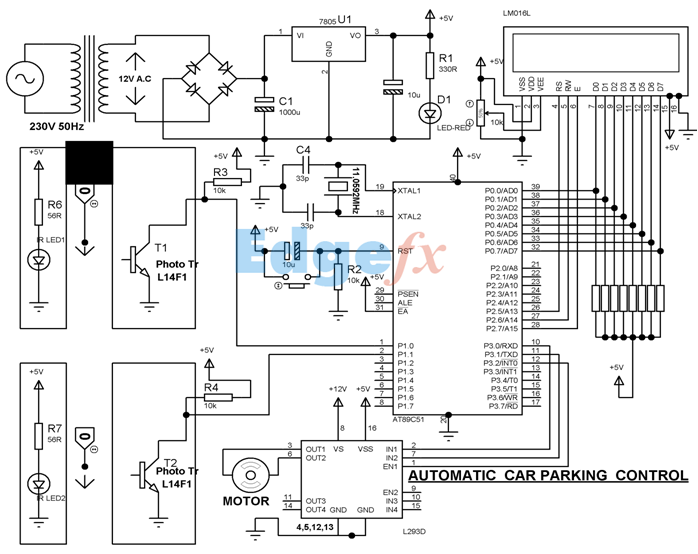
2. Κύκλωμα διακόπτη ελέγχου χρησιμοποιώντας τρανζίστορ
Η παροχή ρεύματος στο κύκλωμα μπορεί να δοθεί κατεβάζοντας την τάση από 230V σε 7.5V χρησιμοποιώντας μετασχηματιστή step-down και, στη συνέχεια, διόρθωση από ανορθωτή γέφυρας με διόδους . Αυτή η διορθωμένη έξοδος τροφοδοτείται σε πυκνωτή φίλτρου και στη συνέχεια διέρχεται μέσω του ρυθμιστή τάσης. Η ρυθμιζόμενη έξοδος 5V λαμβάνεται από τον ρυθμιστή τάσης. Η επαναφορά pin9 συνδέεται μεταξύ του πυκνωτή και της αντίστασης.

Κύκλωμα ελέγχου κινητήρα Stepper χρησιμοποιώντας τρανζίστορ
Γενικά, ο βηματικός κινητήρας αποτελείται από τέσσερα πηνία όπως φαίνεται στο σχήμα. Έτσι, για την οδήγηση του κινητήρα, απαιτούνται τέσσερα κυκλώματα οδηγού. Αντί να χρησιμοποιούν το IC του ελεγκτή βηματικού κινητήρα για την κίνηση του κινητήρα, τέσσερα τρανζίστορ συνδέονται ως κυκλώματα οδήγησης στις 21, 22, 23 και 24 ακίδες του μικροελεγκτή, αντίστοιχα.
Εάν τα τρανζίστορ ξεκινήσουν την αγωγή, τότε θα δημιουργηθεί ένα μαγνητικό πεδίο γύρω από το πηνίο προκαλώντας περιστροφή του κινητήρα. Η ταχύτητα του κινητήρα stepper είναι ευθέως ανάλογη με τη συχνότητα παλμού εισόδου. Ένας κρυσταλλικός ταλαντωτής συνδέεται στις ακίδες 18 και 19 για να παρέχει συχνότητα ρολογιού μικροελεγκτή περίπου 11.019MHz.
Ο χρόνος εκτέλεσης οποιασδήποτε εντολής μπορεί να υπολογιστεί χρησιμοποιώντας τον παρακάτω τύπο
Χρόνος = ((C * 12)) / f
Όπου C = αριθμός κύκλου
Και F = συχνότητα κρυστάλλου
Ένα από τα κυκλώματα που βασίζονται στην εφαρμογή που χρησιμοποιεί ένα stepper μοτέρ για περιστροφή ηλιακού πλαισίου περιγράφεται παρακάτω.
Έλεγχος κινητήρα Stepper με χρήση προγραμματισμένου μικροελεγκτή 8051
Έργο Sun Tracking Solar Panel προορίζεται να παράγει τη μέγιστη ποσότητα ενέργειας ρυθμίζοντας αυτόματα το ηλιακό πάνελ. Σε αυτό το έργο, ένας βηματικός κινητήρας που ελέγχεται από έναν προγραμματισμένο μικροελεγκτή οικογένειας 8051 συνδέεται με το ηλιακό πλαίσιο για να διατηρεί το πρόσωπο των ηλιακών πάνελ πάντα κάθετο στον ήλιο.

Έλεγχος κινητήρα Stepper με χρήση μικροελεγκτή από το Edgefxkits.com
ο προγραμματισμένος μικροελεγκτής παράγει κλιμακωτούς ηλεκτρικούς παλμούς σε τακτά χρονικά διαστήματα στον κινητήρα stepper για περιστροφή του ηλιακού πλαισίου. Το IC οδηγού χρησιμοποιείται για την κίνηση του κινητήρα stepper καθώς ο ελεγκτής δεν είναι σε θέση να παρέχει τις απαιτήσεις ισχύος του κινητήρα.
Αφήστε τις προτάσεις, τα σχόλιά σας και τα ερωτήματά σας δημοσιεύοντας σχόλια στην παρακάτω ενότητα σχολίων. Θα κάνουμε το καλύτερο δυνατό για να σας βοηθήσουμε τεχνικά σχετικά με αυτό το άρθρο και ανάπτυξη έργων ηλεκτρικής και ηλεκτρονικής χρησιμοποιώντας τον κινητήρα stepper.